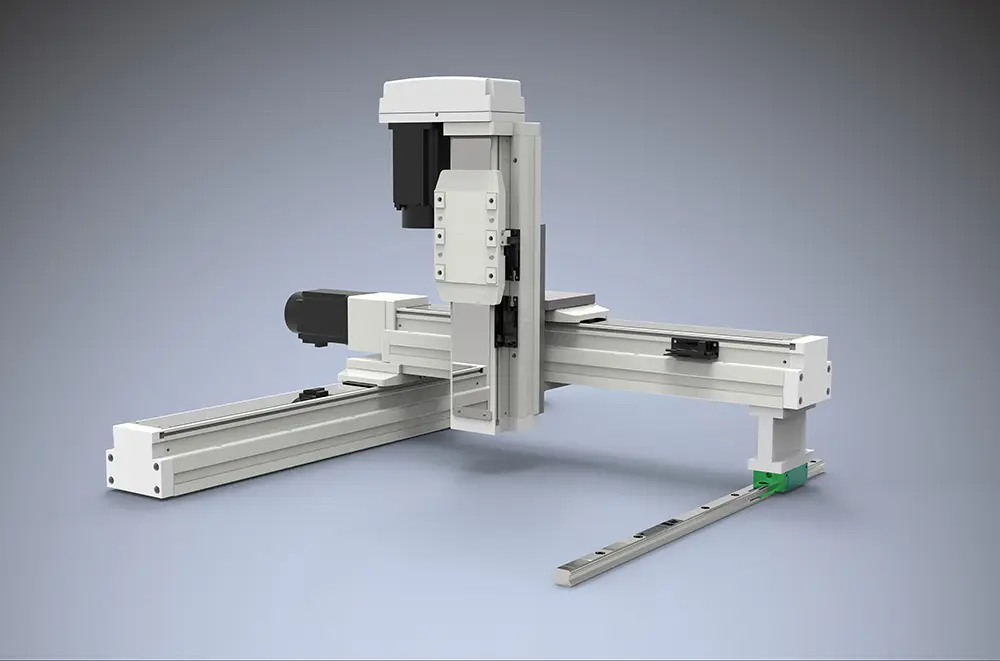
悬臂辅轨式机械手,基于三轴直线模组结构,通过辅轨分担悬臂受力,在长行程与重载工况下保持稳定运行。适用于自动化上下料、多工位联线及连续搬运场景,兼顾结构紧凑性与运行可靠性,满足对稳定性要求较高的自动化产线应用。

 微信视频号
微信视频号 微信公众号
微信公众号 抖音短视频
抖音短视频