本方案为一套工业机器人第七轴行走地轨 + 输送线联线的重载自动化上下料系统,适用于中大型工件的连续搬运、多工位上下料及产线协同作业。
整套系统以长行程重载行走地轨为核心,机器人沿地轨方向移动,对两侧输送线及多工位设备进行自动化操作,实现高效率、稳定、连续的生产节拍。

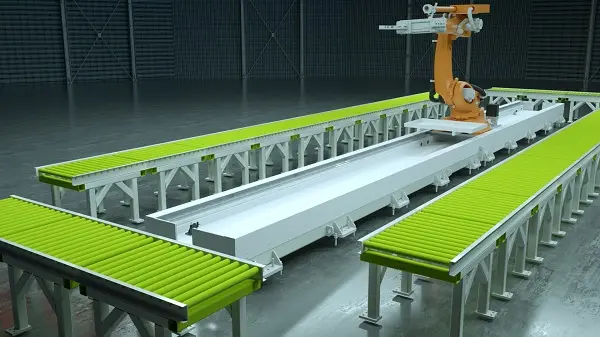
从现场布局可以看到:
中央为重载型机器人第七轴行走地轨
工业机器人安装于地轨滑台之上
地轨两侧布置滚筒输送线
输送线与机器人作业区域平行排列,形成对称式产线结构
这种布局非常适合长工位、多节拍、连续上下料的生产模式,可大幅提升机器人覆盖范围与产线利用率。
该行走地轨具备以下特点:
整体采用高刚性箱式结构设计
底部多点支撑,适合长行程安装
滑台宽大,满足重载机器人稳定运行
预留机器人安装与定位接口,便于快速装配
该结构设计重点解决了重载工况下的刚性、稳定性与运行平稳性问题,适合长期连续运行的自动化产线。

本套工业机器人第七轴行走地轨重载自动化上下料系统,通过合理的地轨结构设计与输送线联线布局,实现了机器人在长行程、多工位工况下的高效稳定运行。
该方案特别适合对重载、连续作业、产线协同有较高要求的制造企业,是实现自动化升级与产能提升的有效解决方案。
如需根据实际工况进行行程、负载、结构形式的定制设计,可进一步沟通具体需求。