工业机器人在焊接、搬运、上下料等自动化应用中,常因本体工作范围受限而无法覆盖多个工位。工业机器人第七轴行走地轨作为机器人外部扩展轴,通过直线移动方式有效扩大机器人作业范围,已成为自动化产线中常见且成熟的解决方案。

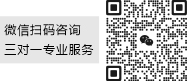
如图所示,该机器人第七轴采用整体式地轨结构,机器人安装在一体化移动平台上,通过第七轴在地轨上实现往复行走。
该结构可将机器人从固定工位解放出来,实现多工位连续作业。
整套系统主要由以下部分组成:
高刚性地轨本体
重载直线导轨与重载型滚轮箱
齿轮齿条直线传动机构
伺服驱动与减速机
通过合理的结构设计,保证机器人在高速运行与满载工况下仍保持良好的稳定性与定位精度。
从系统结构可以看出,该方案支持两台工业机器人共用一条第七轴行走地轨。
双机器人共轨设计在自动化产线中具有明显优势:
一套地轨服务多台机器人
减少设备占地与系统成本,适合空间受限的生产现场。多工位连续作业
机器人可随第七轴移动,覆盖多个工位或设备。协同运行,提高节拍效率
适用于焊接、搬运等对节拍要求较高的应用场景。
该结构已广泛应用于柔性制造系统和自动化升级改造项目中。
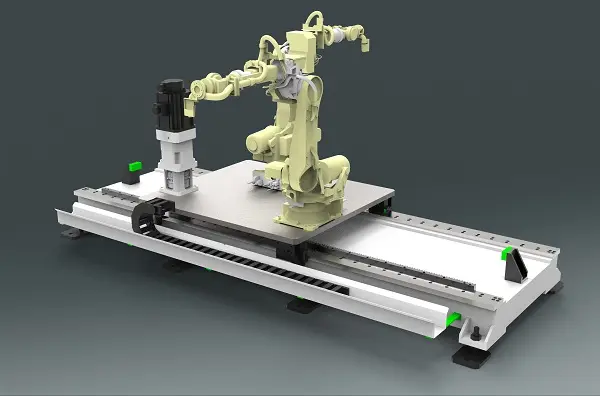
从第三张图可见,该机器人第七轴采用齿轮齿条驱动方式。
齿轮齿条传动是机器人第七轴中常见的成熟方案,特别适合长行程和重载应用。
工业机器人第七轴行走地轨作为机器人外部轴的重要组成部分,已成为自动化产线升级中的关键单元。
通过重载、高精度的结构设计,机器人第七轴可有效扩展作业范围,提升生产效率,降低整体自动化成本。
如需了解机器人第七轴行走地轨定制方案、技术参数或应用建议,欢迎咨询专业厂家进行技术对接。